KOSMOS
Embedded Systems Lead
Electrical and Computer Engineering Senior Design, University of Kentucky
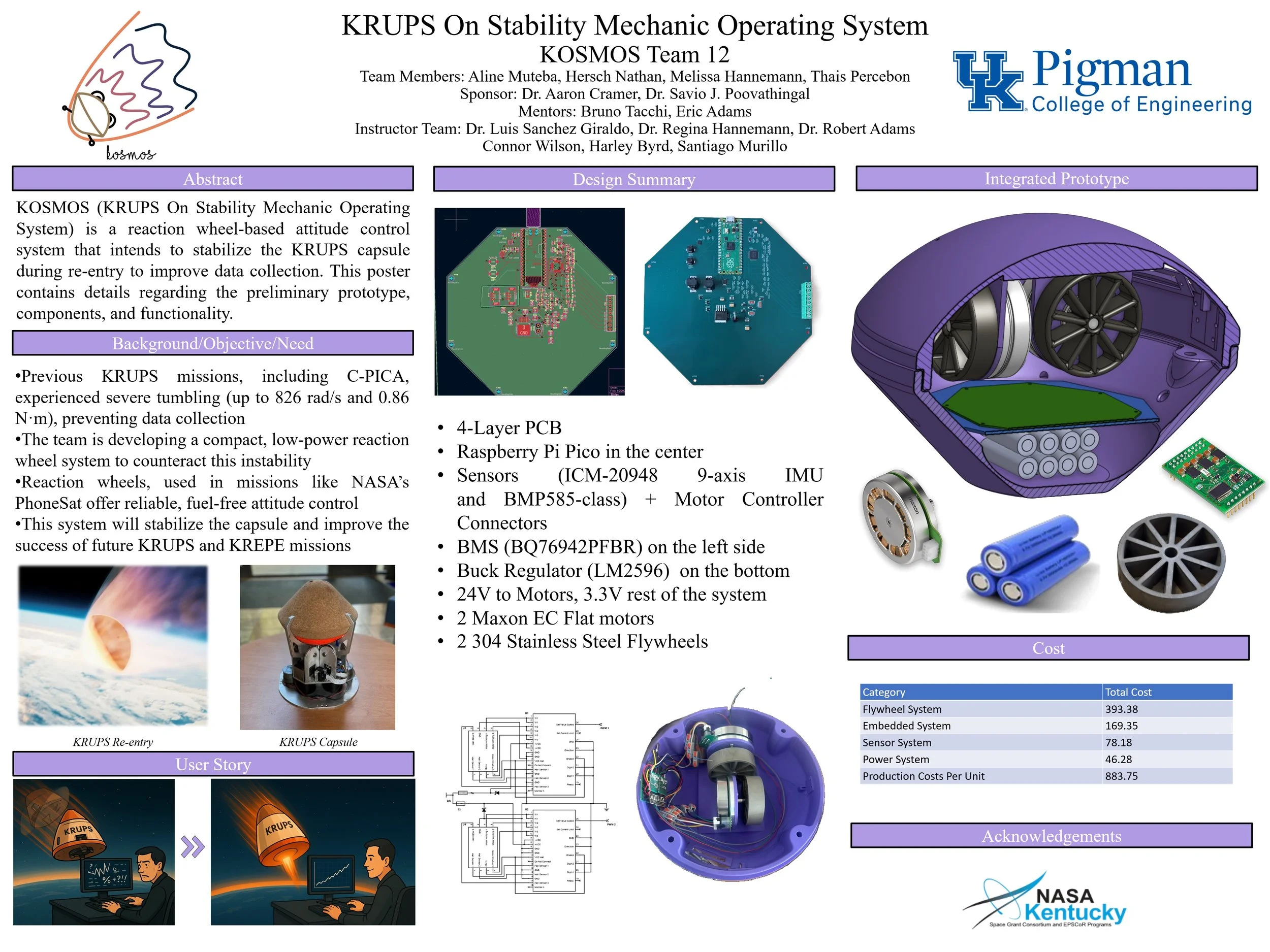
KOSMOS (KRUPS On Stability Mechanic Operating System) is a reaction wheel based attitude control system for stabilizing a hypersonic re entry capsule at the University of Kentucky. I served as Embedded Systems Lead for a four person team and was responsible for the firmware stack from bring up through real time control integration.
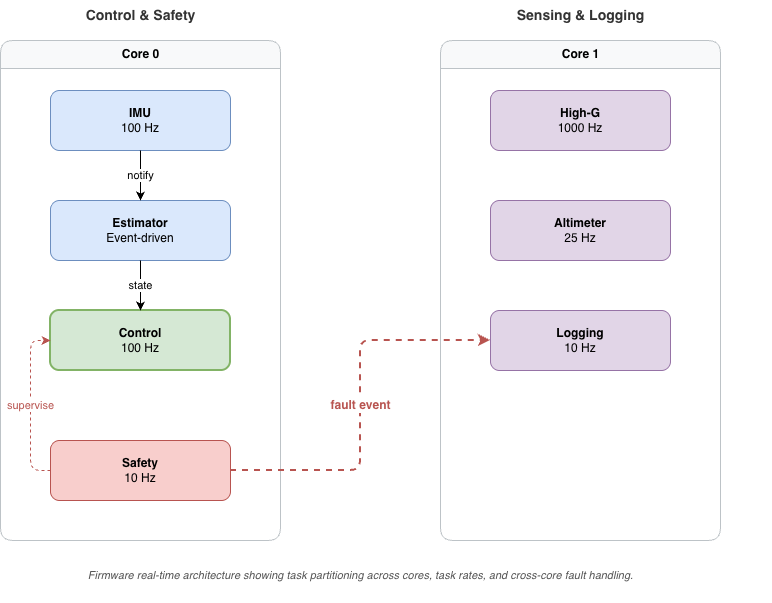
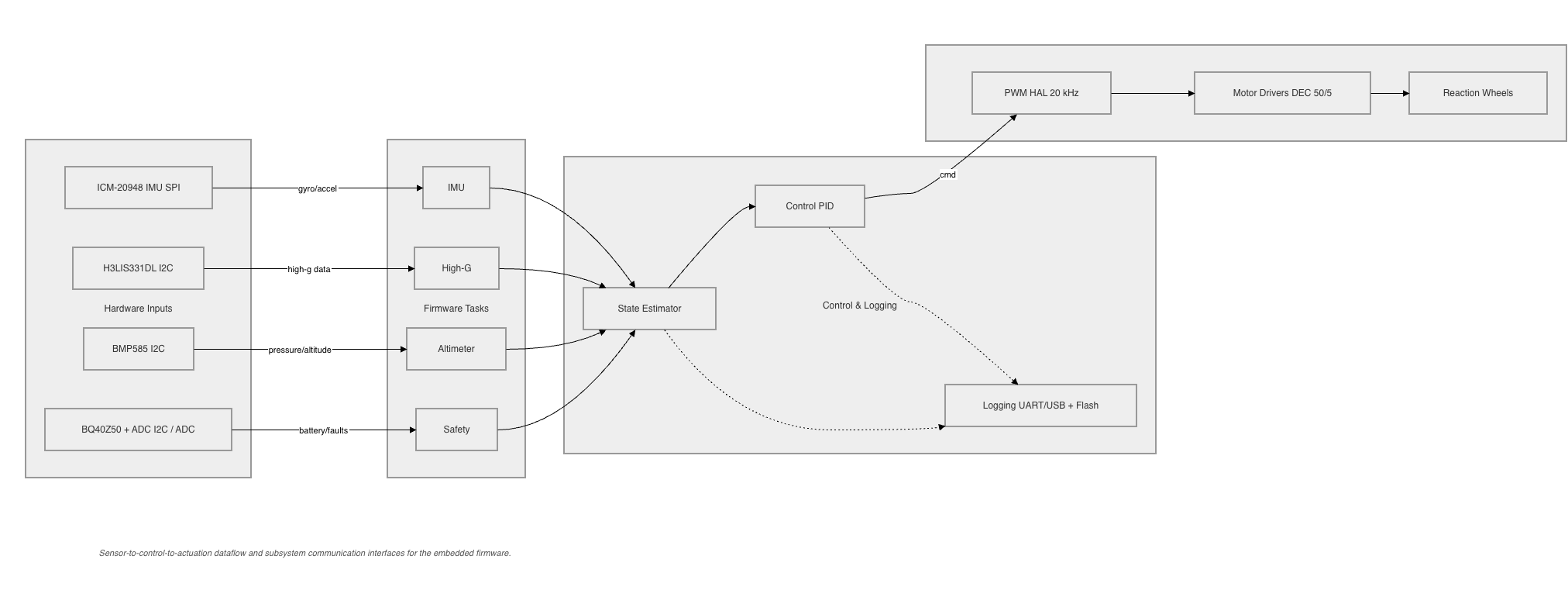
I implemented the firmware on a Raspberry Pi Pico 2 using FreeRTOS SMP to use the dual Cortex M33 cores effectively. Core 0 handled the time critical safety, IMU acquisition, Extended Kalman Filter, and dual axis PID control tasks, while Core 1 handled high G sensing, barometric altitude sampling, and telemetry logging. I also built the hardware abstraction layer for SPI, I2C, PWM, ADC, and UART or USB serial interfaces.
The control outputs drove two Maxon DEC 50/5 motor controllers connected to orthogonally mounted Maxon EC brushless flat motors and 304 stainless steel flywheels. I added slew rate limiting on the PWM output to reduce mechanical shock during enable and disable transitions.
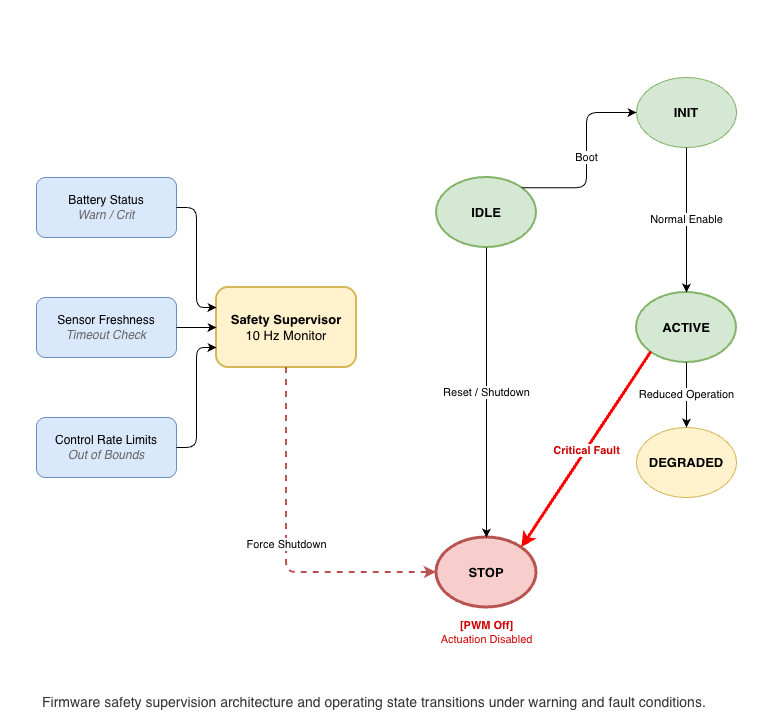
The Safety task monitored battery voltage, sensor freshness, and angular rate limits. Faults were routed through a FreeRTOS event queue and could transition the system through IDLE, INIT, ACTIVE, and DEGRADED states or trigger an immediate STOP that shut down all PWM output. I also implemented fault injection tests and a fake sensor proof mode to validate the estimator to control to logging pipeline before live hardware bring up.