Automation in Material Inspection and Handling
Robotics and Automation Intern, Automation, Robotics, and Controls (E-3), Los Alamos National Laboratory
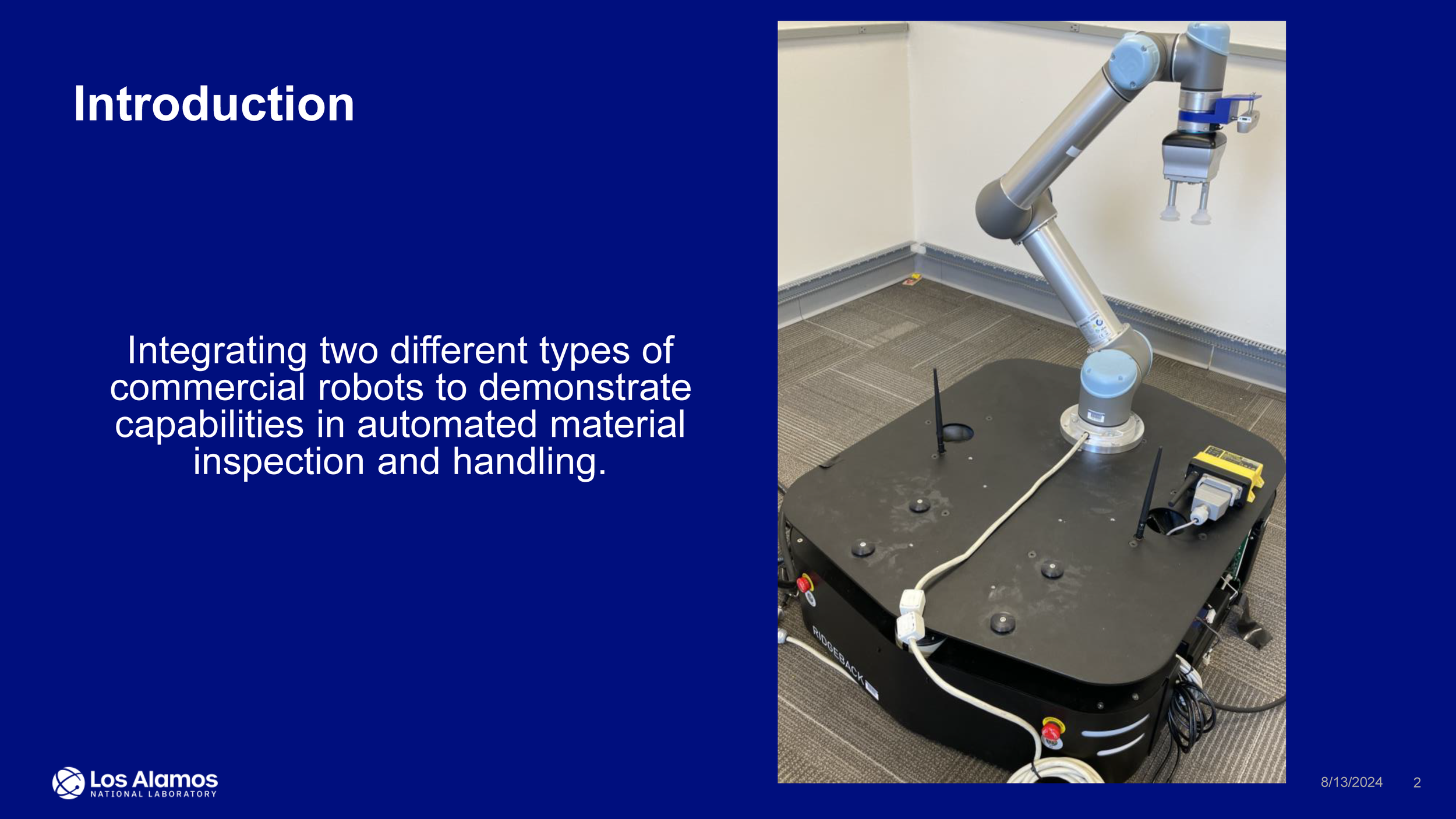
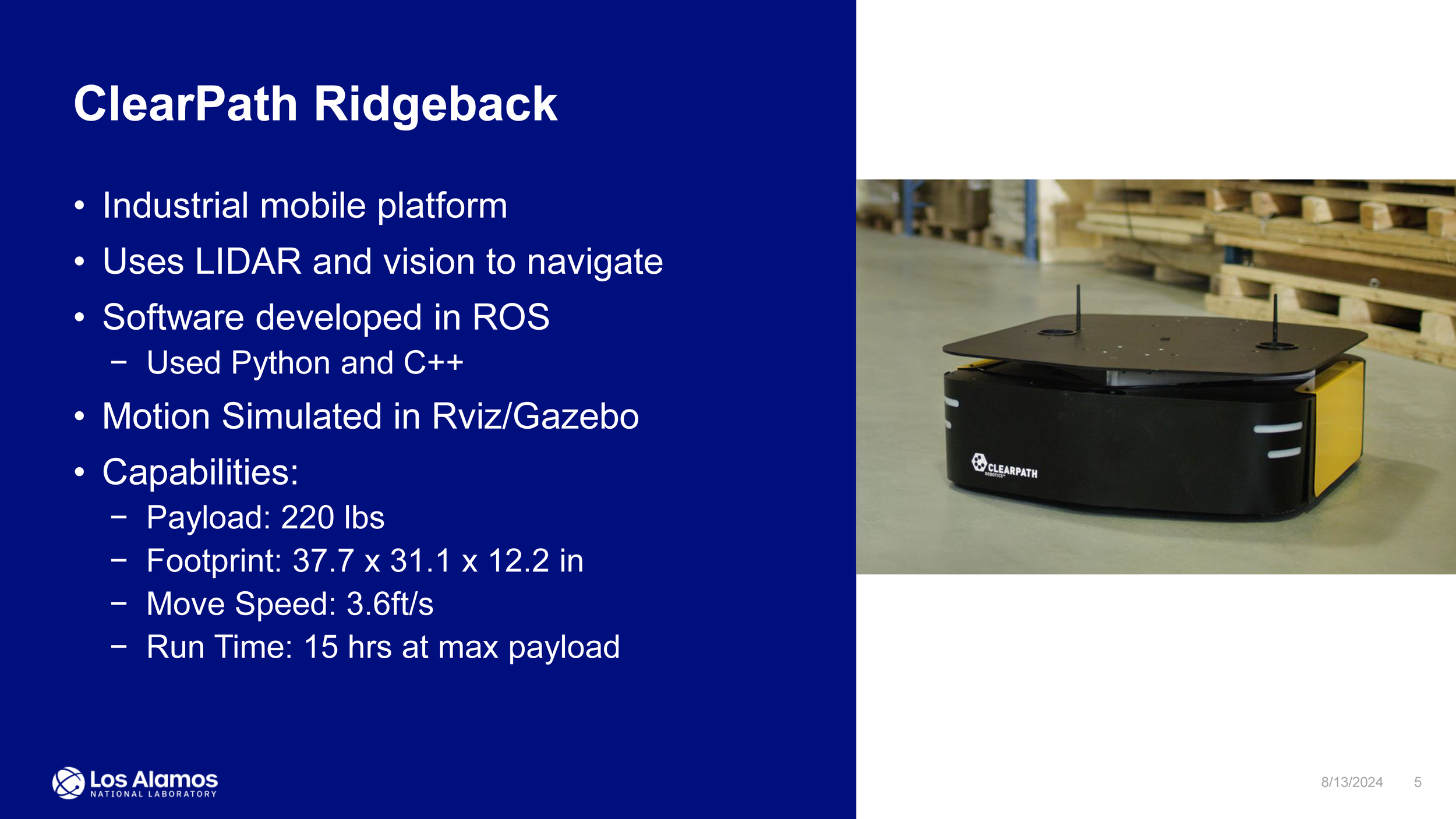
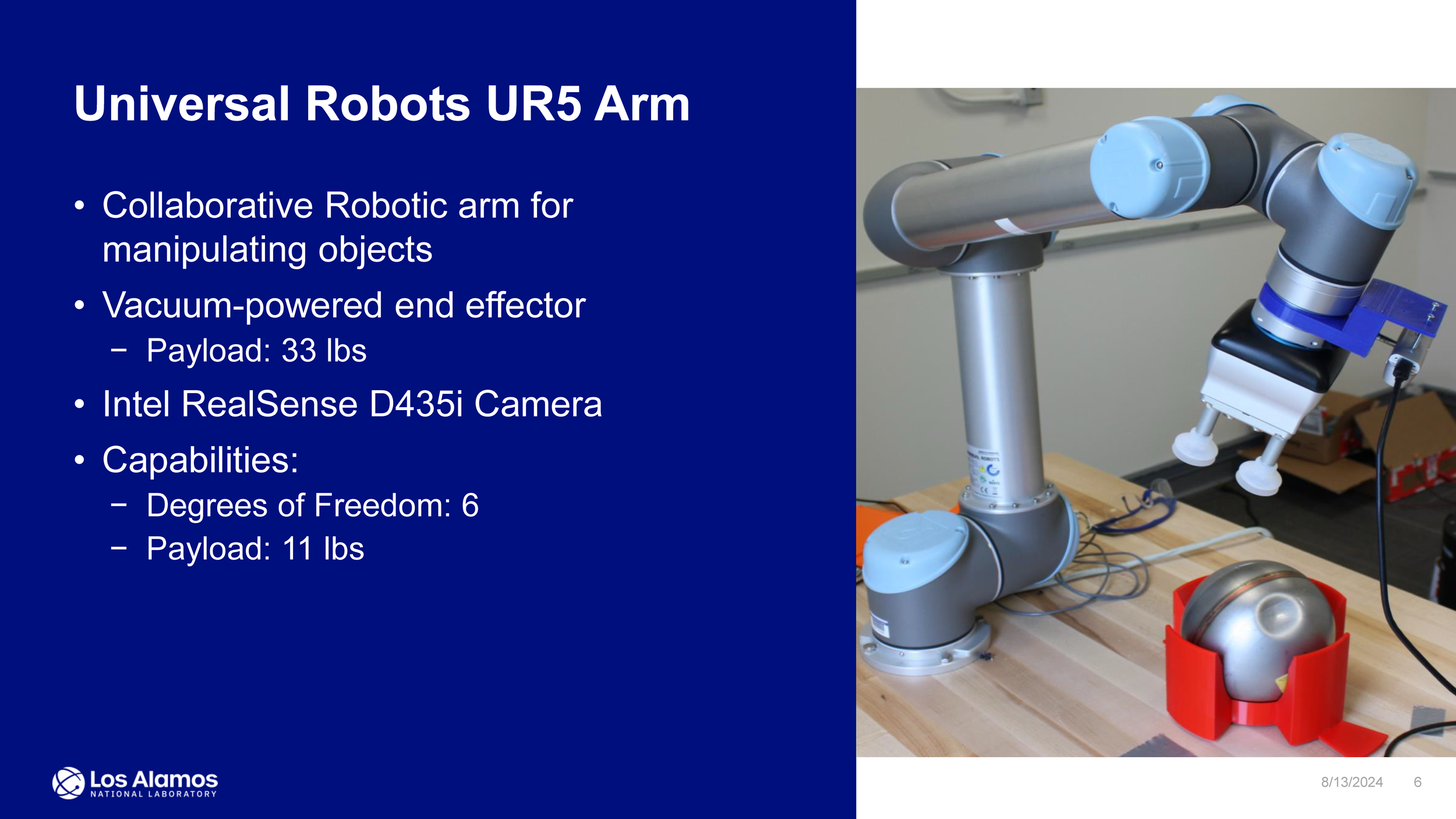
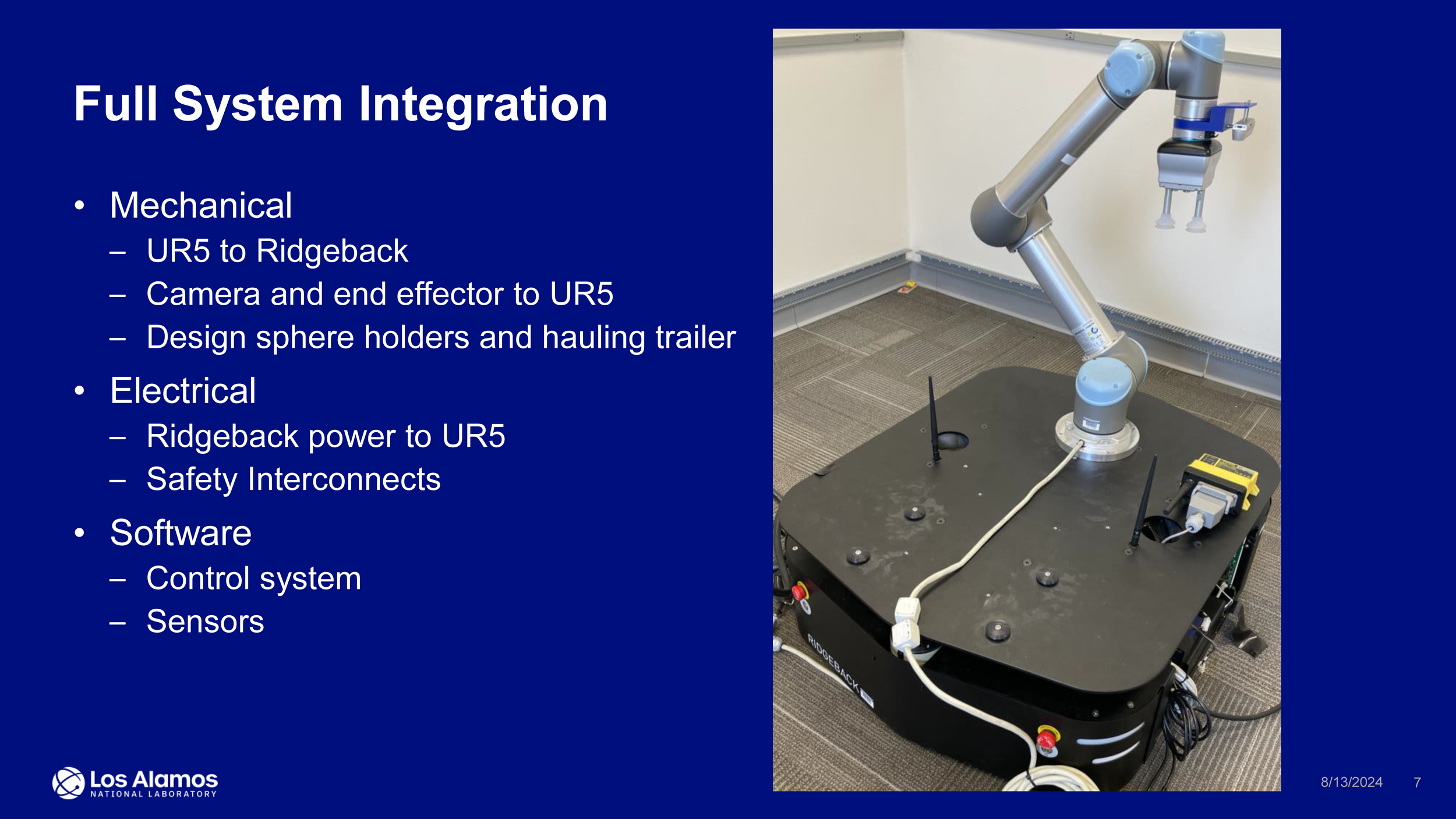
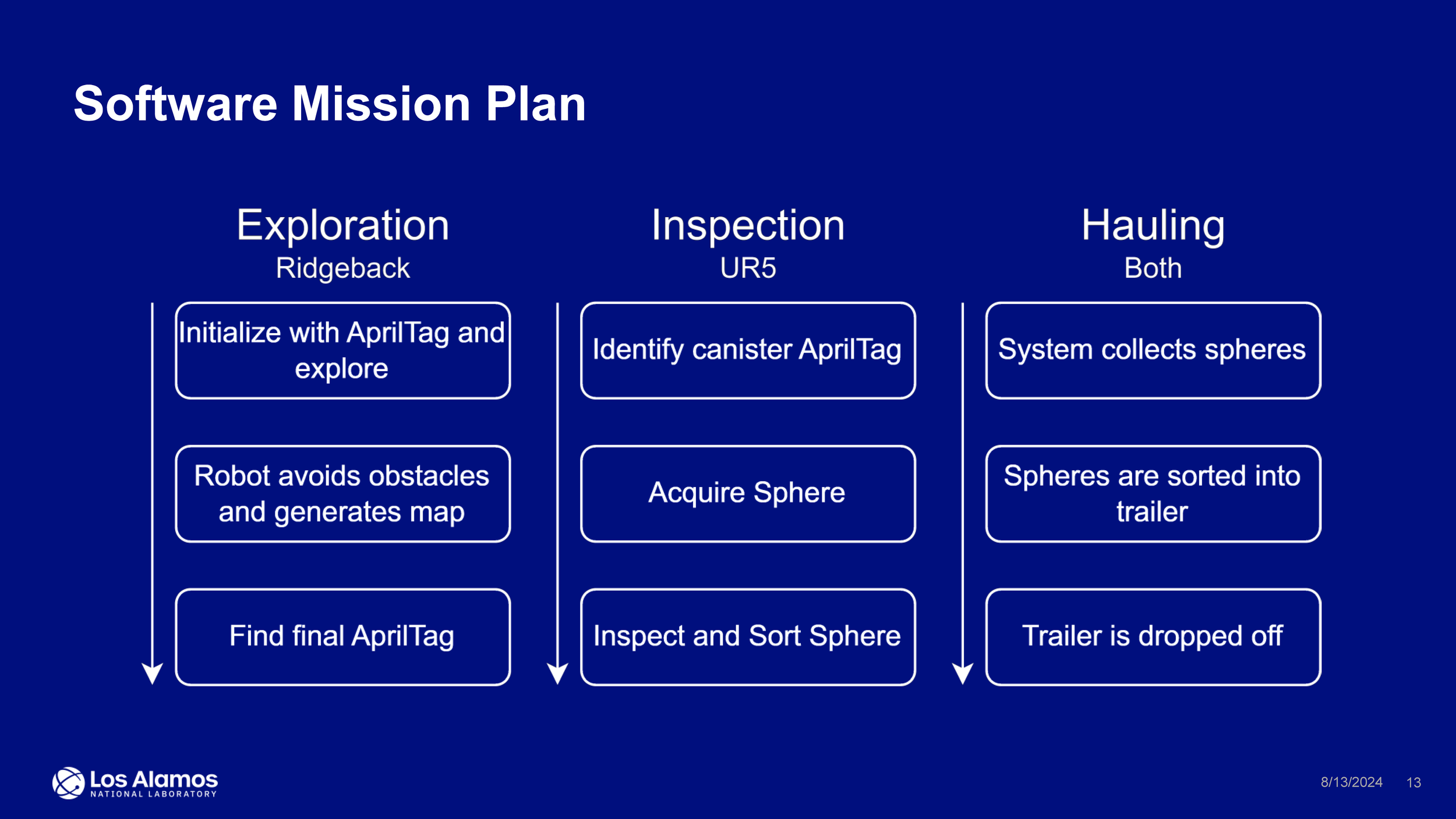
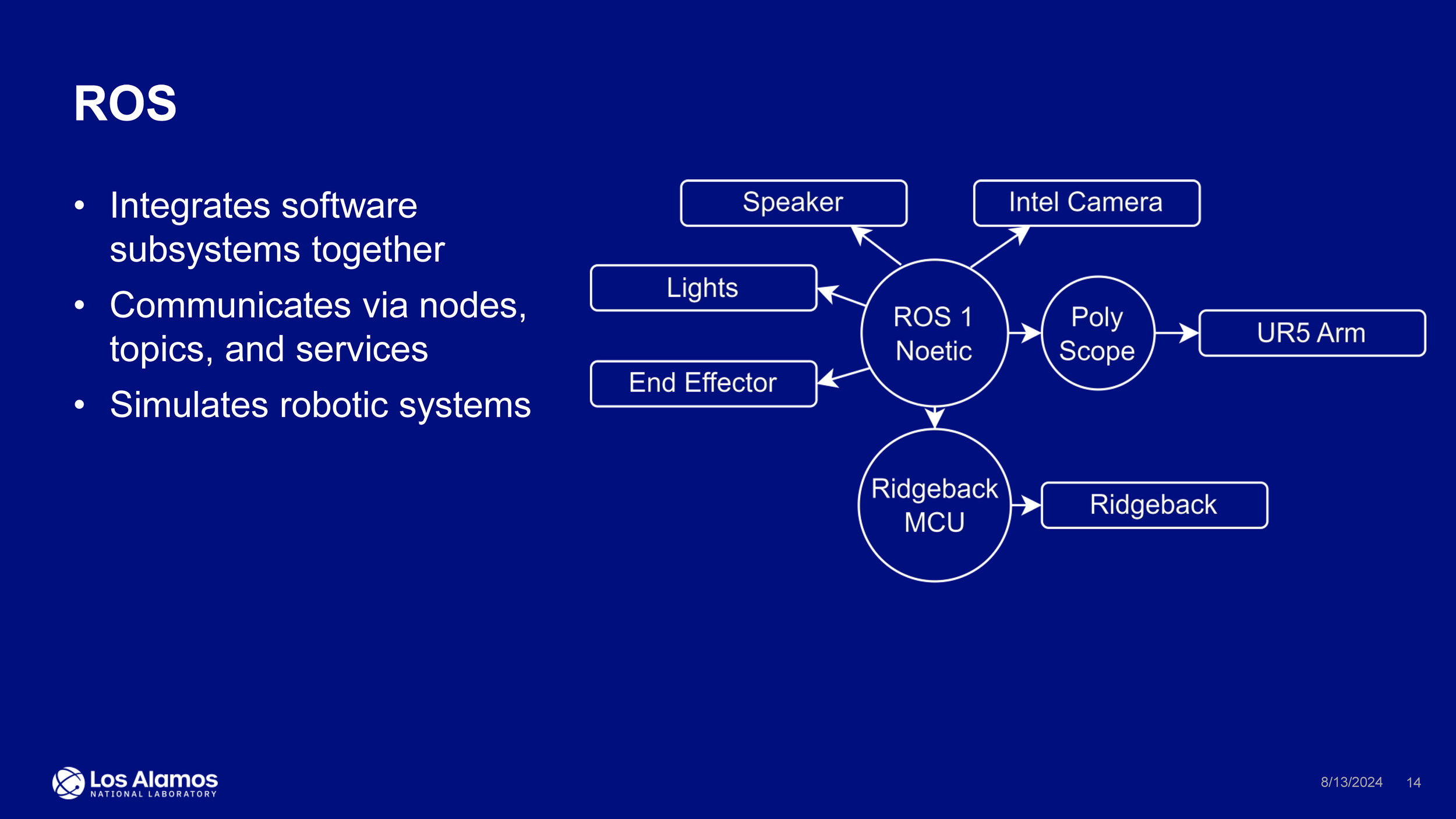
Interned at Los Alamos National Labs working in the Automation, Robotics, and Controls (E-3) group. My primary project was working on the Automation in Material Inspection and Handling where with a team of two other interns we integrated a Clearpath Ridgeback Mobile Platform robot with a Universal Robotics UR5 robotic arm. Then we developed a material handling and inspection demonstration to show capabilities.
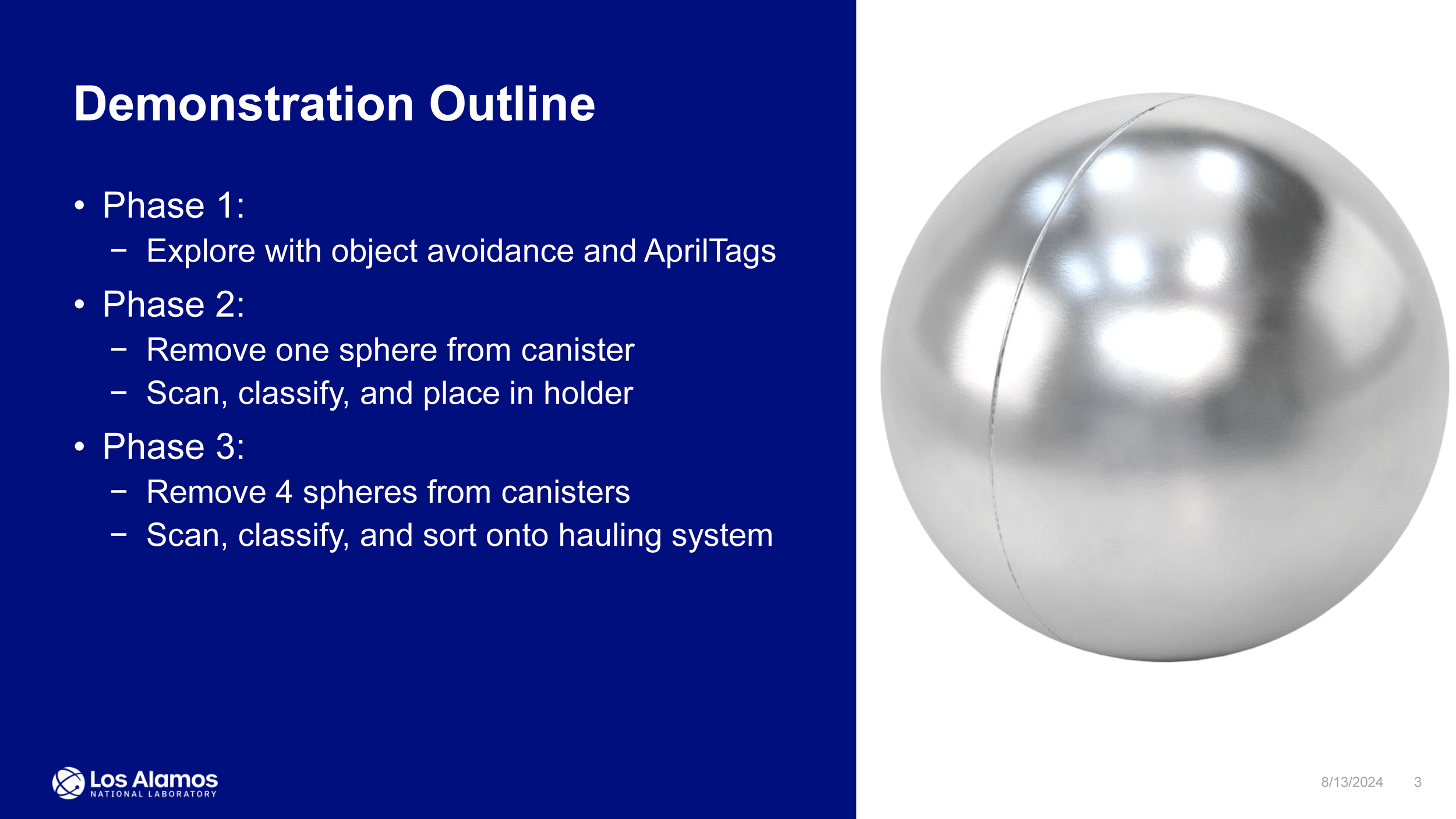
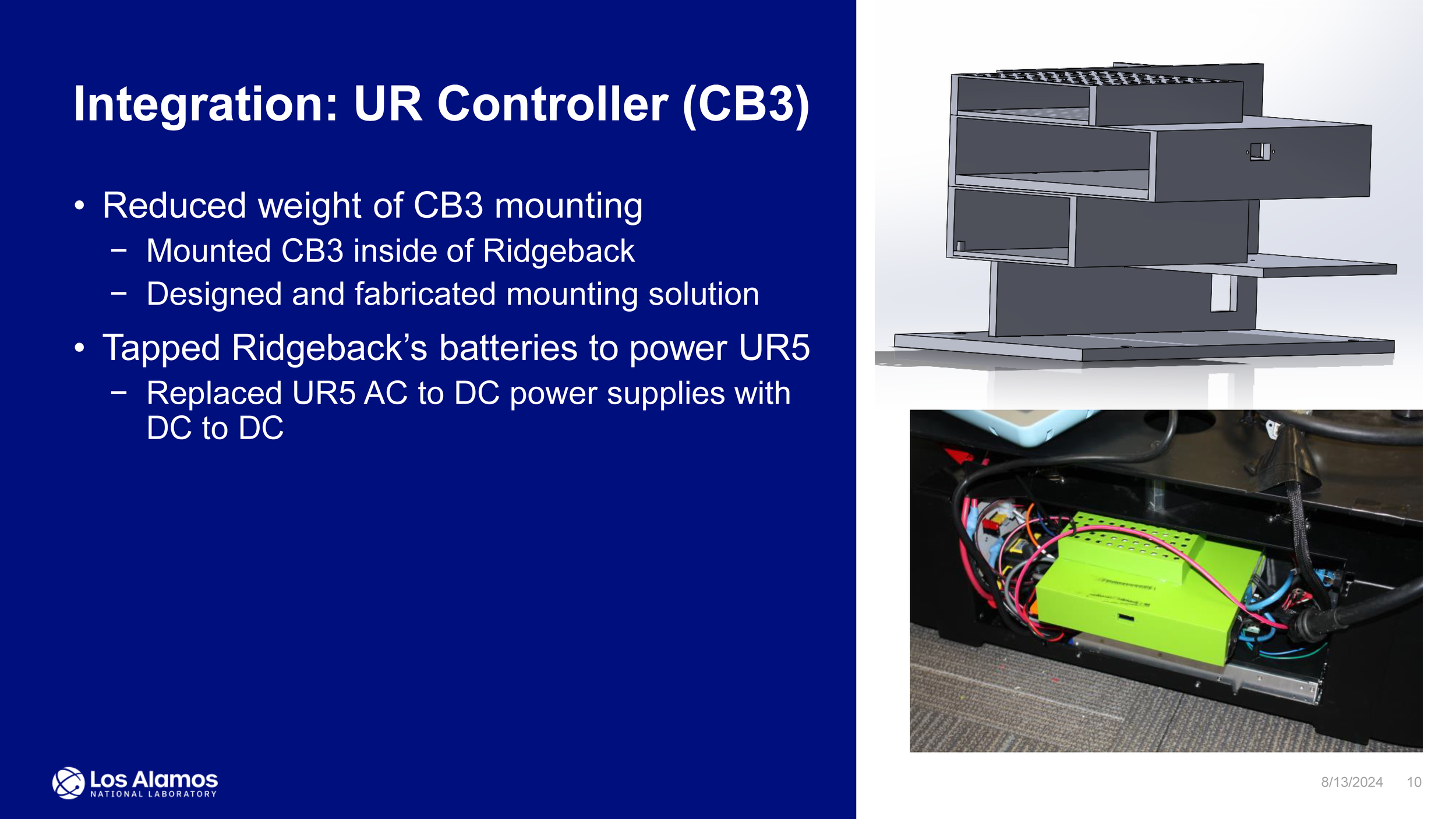
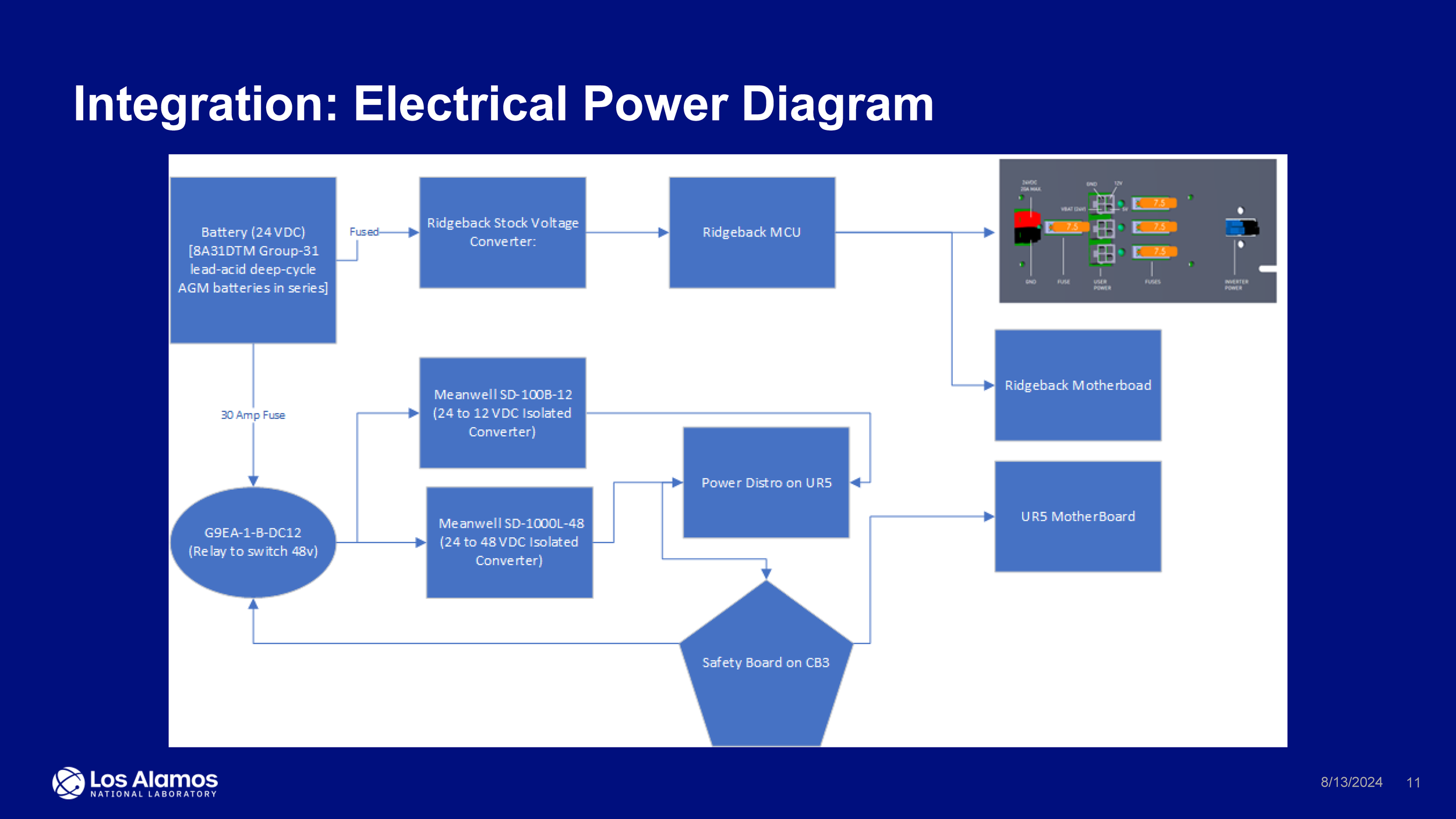
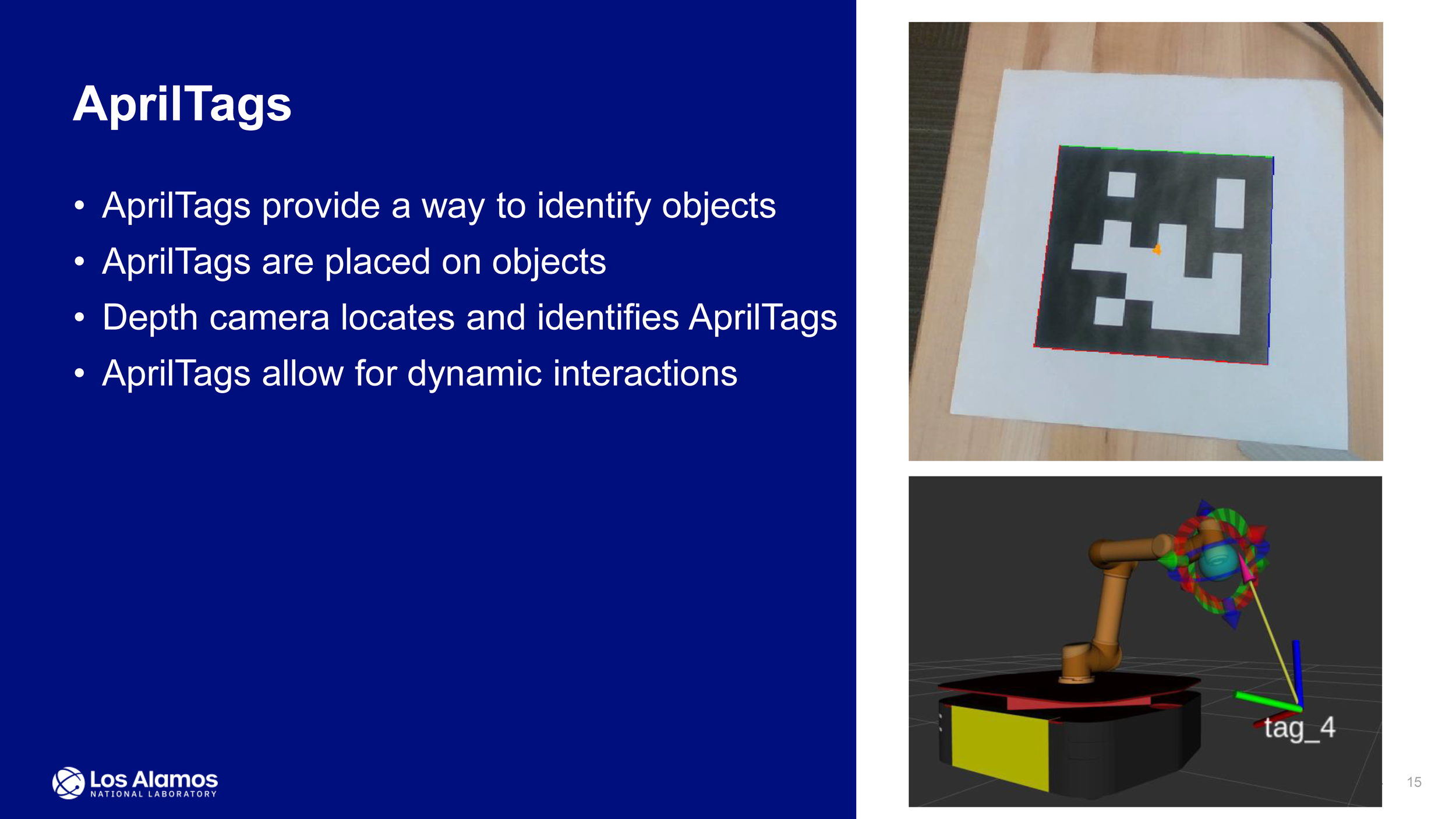
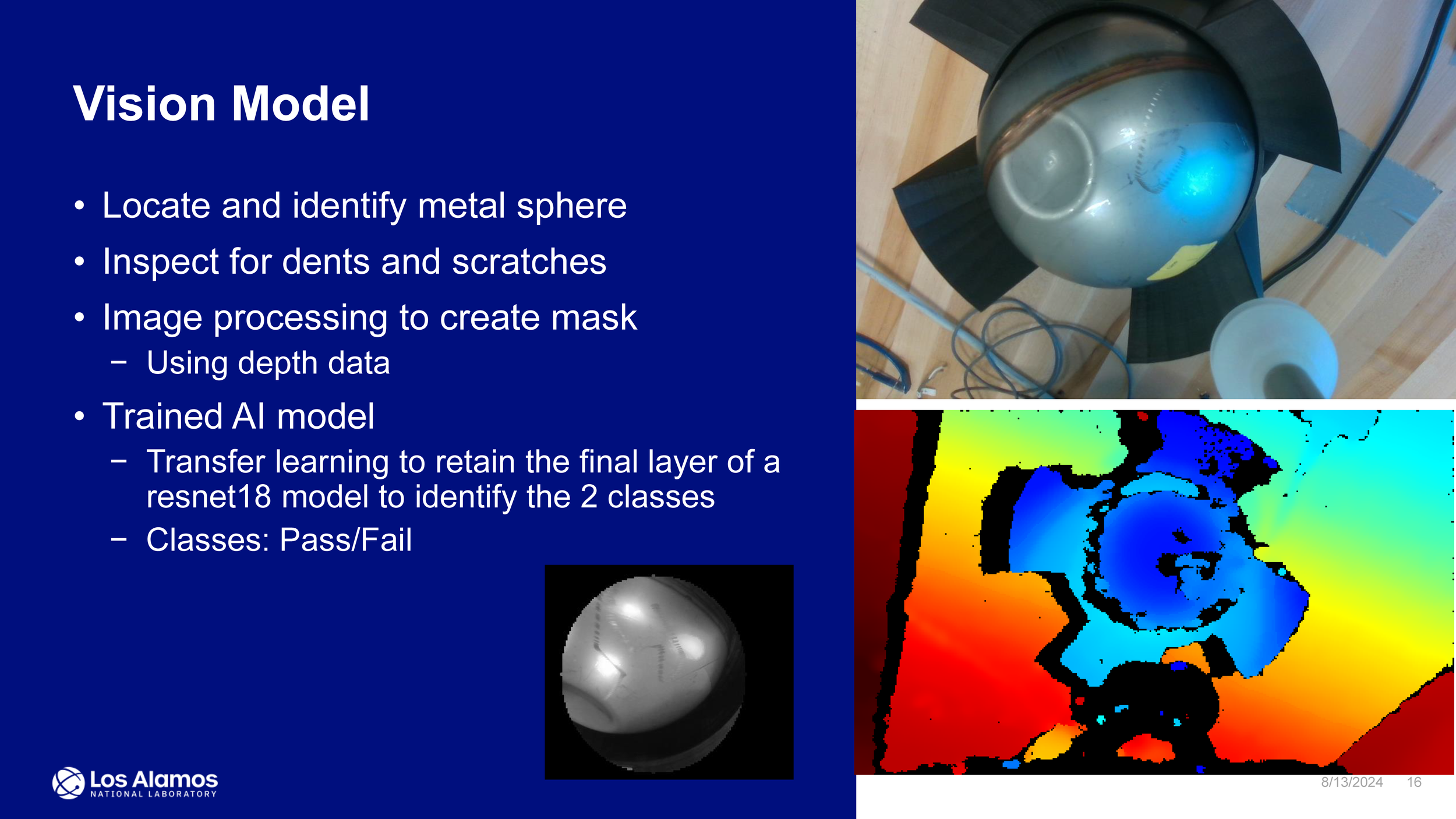
I was in charge of electrical integration and modifying the UR5's control box to be powered off of a battery tap from the Ridgeback's battery. Additionally, I integrated the safety between the two robots with a wireless emergency stop. I also developed a computer vision pipeline to classify spheres based on damage. That model used a AI model (RESNET-18) and transfer learning to retrain it for our spheres.
This work has been publicly released under a Los Alamos National Lab unlimited release: LA-UR-24-28431.